Intelligent Aerial Robots for Environment and Infrastructures
Key Members: Bahadir Kocer
We are interested in the design, perception, and control of aerial robots to foster sustainable operations. Our work is focussed on aerial-physical interactions in problems such as environmental sensing and aerial repair, and we take a nature-inspired approach to adaptive designs, algorithms, and strategies that are tailored for diverse aerial robots and tasks. We intend to address the intricate challenges posed by dynamic aerial system operations and their environments through continual learning in control design.
Sampling with drones in disaster zones
Key Members: Tom Richardson
We are interested in developing novel drone technology to aid applied research in a number of scientific fields. We have worked with volcanologists at the Univeristy of Bristol to develop aircraft that can extract ash samples from eruption plumes at Vocán de Fuego, Guatemala Guatemala and Manam volcano in Papua New Guinea. The international team showed how to take measurements from the air, to supplement those from earth and space, and use them to help determine how likely an eruption is to take place. You can see their findings published in Science Advances
Wildlife monitoring with drones
Key Members: Tom Richardson
We are collaborators on the EU-funded WildDrone Project, an international training network. The project will enable doctoral students to gain skills needed to enable the use of drones as a conservation tool for endangered African wildlife. By working across Europe and Africa, including in the Wadden Sea National Park in Denmark, we aim to enhance wildlife conservation efforts by using autonomous drone technology to monitor wildlife populations.
Vertiport routing for drone takeoff and landings
Key Members: Arthur Richards
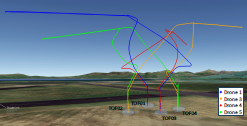
This project focuses on developing an innovative system for managing drone traffic at vertiports - specialised airports for vertical takeoff and landing aircraft. The goal is to enable multiple drones to simultaneously takeoff and land, to allow for future urban air mobility hubs. It focuses on creating efficient and safe methods for multiple aircraft to simultaneously operate in confined airspaces. The system was modelled in simulation and in real life using multiple drones. This approach aims to maximize operational capacity while maintaining strict safety standards. To find out more please take a look at our conference paper.